Brushless DC Motors Gear Motors > Technology > Performance Improvement of Driver for BLH Series Brushless Motors
Performance Improvement of Driver for BLH Series Brushless Motors
The BLH Series, which consists of a compact brushless motor and driver, is a DC power input product suitable for installing inside equipment. This product has been adopted by a wide range of customers who value downsizing equipment since its launch in 2006. As applications change and diversify, methods and needs for motors change year by year. Therefore, Oriental Motor improved the performance of the driver so that more customers can use this product. In particular, with a focus on “speed performance tracking improvement” and “noise reduction”, we adopted the sine wave drive system by vector control for motor control. Using the MEXE02 support software allows the digital setting and torque control. This report describes the technologies adopted to improve the performance of the BLH Series driver
1. Introduction
As applications change and diversify, methods and needs for brushless motors are changing yearly. The adoption of brushless motors has especially increased in equipment requiring speed tracking of set speeds, such as automated guided vehicles (AGVs) and autonomous mobile robots (AMRs), as well as those requiring quietness, such as chemical equipment. To respond to changing market demands, Oriental Motor has developed a new driver for the DC power input compact brushless motor BLH Series (this new driver is called “BLH2D”). BLH2D is a driver designed to improve performance with a focus on “tracking performance in speed” and “noise reduction”. (See Figure 1 and Figure 2.)
This report describes the technologies adopted to improve performance. BLH2D includes three types of drivers, “Analog setting type”, “Digital setting type”, and “RS-485 communication type”. This section explains the “Digital setting type”.

2. Motor Control
2.1. Adopting Vector Control
The phase control of the motor current was not performed in the conventional model. Adopting vector control as the motor control method enables BLH2D to control the current phase. This allows processing of regenerative power and the torque limiting function. The motor drive system was also changed from the square wave drive system used in the conventional model to the sine wave drive system because the sine wave current needs to flow through the motor in vector control.
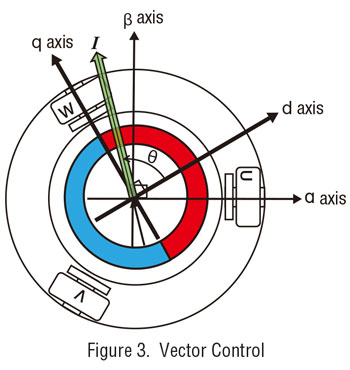
Here we explain vector control in Figure 3.In vector control, consider the coordinates consisting of the α and β axes are on the stator of the motor and those consisting of the d and q axes are on the rotor. The direction of the magnetic flux generated by phase U of the stator is defined as α axis, that perpendicular to α axis as β axis, that of the magnetic flux generated by the rotor magnet as d axis, and that perpendicular to d axis as q axis. The motor current is defined as I, and the angle between the d axis and the current I is defined as θ.
In vector control, the motor current is represented by two components: the current Id flowing in the d axis direction and the current Iq flowing in the q axis direction. Id generates magnetic flux in the direction opposite to the magnetic flux of the magnet, and Iq generates it in the direction perpendicular to that. Therefore, the magnitude of torque is determined by that of the q axis current (see Equation 1). BLH2D achieves high-efficiency drive by controlling the current vector I of the d-q coordinates to always stay in the q axis direction (θ= 90°, −90°).
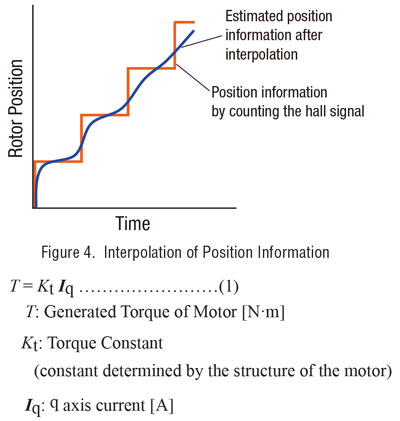
Also, vector control requires feedback to detect the accurate position of the rotor in order to control the magnitude of the motor current with reference to the position of the rotor. However, hall ICs are used for the motor sensors of the BLH Series, and the resolution is 30 P/R. The resolution is not enough to perform vector control, and interpolation of the rotor position is required. BLH2D uses the rotation speed calculated from the pulse interval that the hall ICs output and interpolates the rotor position (see Figure 4). This enables vector control.
2.2. Four-Quadrant Operation
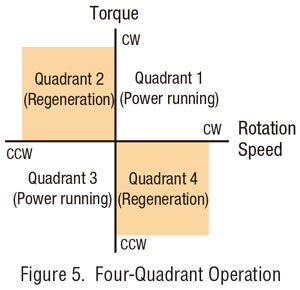
This section explains four-quadrant operation using Figure 5. The horizontal axis indicates rotation speed and the vertical axis indicates torque. The CW direction is the positive direction. There are four possible operating states based on the combination of the motor rotation direction (CW, CCW) and the torque direction (CW, CCW). A state in which the rotation direction matches the torque direction is called a power running state, and a state in which the rotation direction is opposite to the torque direction is called a regenerative state.
The conventional model cannot drive in quadrant 2 and quadrant 4. Therefore, the braking operation cannot be performed. The deceleration movement is coasting (natural deceleration), and the actual deceleration stop time might be longer than the set deceleration stop time. On the other hand, BLH2D can drive in all four quadrants. This makes braking possible. Achieving the braking operation improves the tracking performance of speed at deceleration and reduces the speed overshoot when changing speeds.
2.3 Torque Limiting, Load Factor Indication
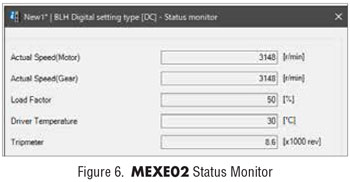
BLH2D added the torque limiting function that limits the upper limit of generated torque and the load factor indication function that can check the generated torque.
As described in 2.1, the generated torque can be controlled by the magnitude of the q axis current in vector control. This enabled the torque limiting function. The generated torque (load factor) is calculated from the magnitude of the q axis current. The load factor calculated here can be checked by the status monitor function of the MEXE02 support software. (See Figure 6.)
3. Processing Regenerative Power During Braking Operation
When the braking operation is performed, the motor goes into a regenerative state and operates as a generator. At this time, since regenerative power is generated, it is necessary to consider how to process the power.
A typical switched-mode power supply does not assume that power is returned, and the output voltage may increase by regenerative power, causing an alarm of overvoltage to occur. For this reason, if a driver does not have a function to consume regenerative power and it is combined with a switched-mode power supply, measures are taken, such as using a power supply with a capacity larger than necessary.
In recent years, in order to achieve compact size and higher efficiency, switched-mode power supplies were developed. The switched-mode power supplies are equipped with output capacitors and are downsized with a function to stop switching when there's no load. This leads to more issues, such as cutting off the output by a small amount of regenerative power. BLH2D is equipped with a function to consume regenerative power through the motor without returning it to the power supply as a countermeasure.
3.1. Voltage Suppression using Regenerative Power
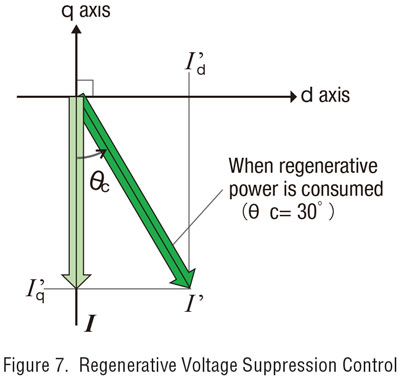
Converting regenerative power into heat is generally done using a resistor. However, this method has a disadvantage since more space is required for a resistor with high- rated power. To make the driver size equal to the conventional model, the BLH2D digital setting type adopted a regenerative voltage suppression control that allows regenerative power to be consumed by the motor.
Figure 7 shows movement when the deceleration stop is performed during rotation in the CW direction. The motor current in the normal state (θ=−90°) is defined as I, and the motor current during regenerative power consumption (θ=−90°+θc) is defined as I ’. In vector control, consuming regenerative power using the motor can be achieved by tilting the direction of the current vector kept in the q axis to the d axis direction. The generated regenerative power is consumed as heat generated by the motor since the current in the d axis direction is consumed as reactive power.
3.2. Deceleration Stop Movement
Regenerative power may also charge a battery. In this case, it is necessary to return regenerative power to the power supply without it being consumed by the driver or the motor.
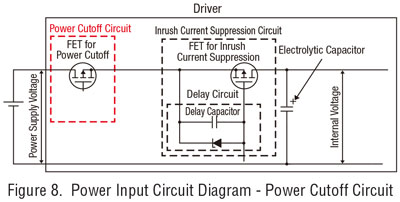
BLH2D is equipped with the “Deceleration mode selection” function that selects how to perform processing of regenerative power according to the power supply used. Deceleration stop movement can be selected from the following three methods. In order to achieve this function, the power input circuit is equipped with a FET for power cutoff (see Figure 8).
3.2.1. Deceleration Stop 1 (Deceleration While Consuming Regenerative Power)
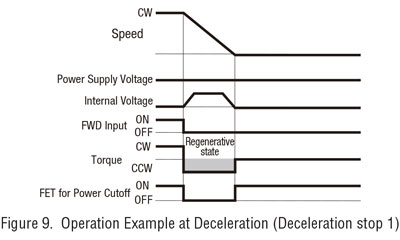
“Deceleration stop 1” represents a deceleration method that performs a braking operation (see Figure 9). Regenerative power is not returned to the power supply because regenerative power generated during deceleration is consumed by performing the regenerative voltage suppression control described before. The mechanism of regenerative processing is shown below.
1) When the motor comes into a regenerative state, the FET for power cutoff is turned OFF immediately. As a result, even if regenerative power is generated, it does not flow back to the power supply.
2) The internal voltage increases due to regenerative power. Then, the regenerative voltage suppression control is performed to flow the motor current in the d axis direction. This causes the generated power to be consumed inside the motor, and the inverter voltage is prevented from increasing more than the specified value.
This is a stop operation assuming that the motor is used in combination with a switched-mode power supply under operating conditions where regenerative power is generated,such as conveyors, etc. However, it is necessary to be careful in operating conditions where regenerative power is successively generated because heat generation of the motor will be high.
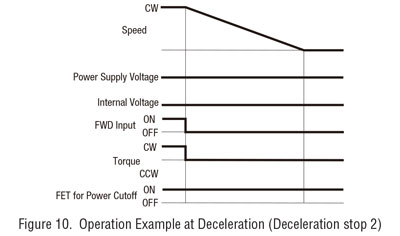
3.2.2. Deceleration Stop 2 (Deceleration Without Generating Regenerative Power)
“Deceleration stop 2” represents a deceleration method that suppresses the brake torque so that regenerative power does not generate. The deceleration movement is coasting (see Figure 10). The internal voltage of the driver does not increase since it does not generate regenerative power.
This is a stopping method that enhances compatibility with the conventional model. It is used when the conventional model is replaced or brake torque will be avoided at stopping.
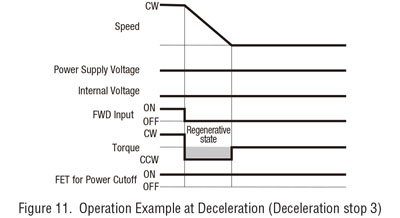
3.2.3. Deceleration Stop 3 (Deceleration Without Consuming Regenerative Power)
“Deceleration stop 3” represents a deceleration method that performs a braking operation. Unlike “Deceleration stop 1”, the regenerative voltage suppression control is not performed, and all generated regenerative power returns to the power supply (see Figure 11). Therefore, the power supply voltage and the internal voltage fluctuate depending on the regenerative processing capability of the power supply. However, if the power supply can perform processing of regenerative power such as a battery, the power supply voltage and the internal voltage will not increase.
If a power supply that can process regenerative power is combined with the motor, the motor can be used in operating conditions where regenerative power is continuously generated, such as when an AGV goes down a slope.
4. Measures Against Inrush Current
When a battery is used as a power supply combined with the BLH Series, an inrush current at power-on is a concern.
When the power is turned on, the electrolytic capacitor inside the driver has not been charged, and a large inrush current flows the moment voltage is applied to it. This may cause the relay contacts used with the power activation to weld.
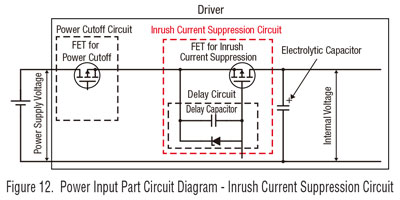
In BLH2D, an inrush current suppression circuit has been added to suppress the inrush current by gradually increasing the voltage applied to the electrolytic capacitor inside the driver. As a result, the inrush current generated at power-on can reduce to 5% of the conventional model.
The newly added inrush current suppression circuit has a FET for inrush current suppression in the power input.The applied voltage to the electrolytic capacitor is slowly increased by gradually charging the delay capacitor connected between the gate and the source (see Figure 12 ).
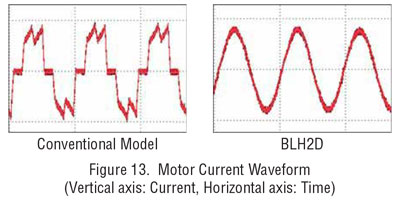
5. Noise Reduction
Noise reduction can be achieved by using the sine wave drive system as the drive system of BLH2D. As shown in Figure 13, the motor current waveform greatly of regenerative power such as a battery, the power supply voltage and the internal voltage will not increase.
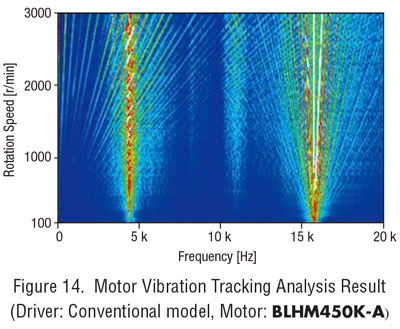
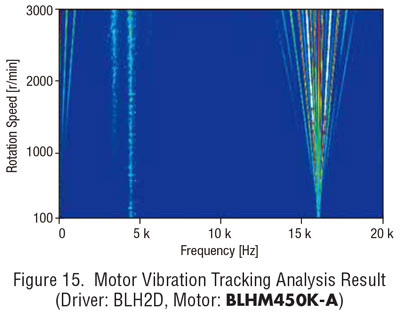
Figure 14 and Figure 15 show the tracking analysis results of the motor surface vibration when the same motor (BLHM450K-A) is driven in combination with the conventional model and BLH2D. Measurements were made for vibrations in the radial direction (see Figure 16). The horizontal axis indicates the frequency component, the vertical axis indicates the rotation speed of the motor, and the color indicates the magnitude of vibrations. The color turns red when the vibration is large and blue when it is small. This result shows that BLH2D can reduce a vibration of audible frequency of 20 Hz to 20 kHz compared with the conventional model. This shows noise reduction has been achieved with BLH2D.
![]()
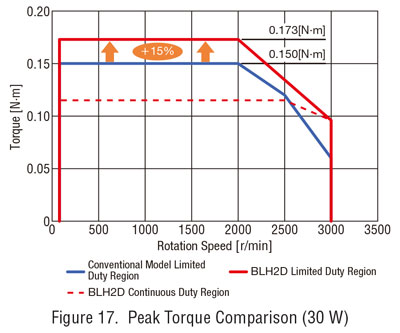
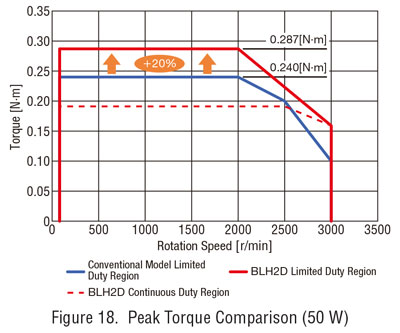
6. Expansion of Limited Duty Region
Figure 17 and Figure 18 show the comparison of the limited duty region between the conventional model and BLH2D. The peak torque of BLH2D is improved by 15% for 30 W and 20% for 50 W compared with the conventional model. This has enabled BLH2D to expand the limited duty region more than the conventional model.
7. Product Line-up
There are three types of BLH2D: “analog setting type”, “digital setting type”, and “RS-485 communication type”. A desired driver can be selected according to your application. So far, this report has explained the “digital setting type”.
7.1. Analog Setting Type
As with the conventional model, the rotation speed can be set only by the analog setting using a variable resistor or an external DC power supply. The power supply cable, the I/O
cable, and the motor cable are compatible with the conventional model. The deceleration stop movement is coasting to a stop as with the conventional model.
7.2. Digital Setting Type
Using the MEXE02, data can be set with a PC via USB communication. Various functions such as the selection function of the deceleration stop movement and the torque limiting function are available. User-friendliness of interfaces, such as the extended number of I/Os and the setting of the rotation speed by PWM input improved.
As with the conventional model, analog setting for rotation speed and torque limiting is available.
7.3. RS-485 Communication Type
This is a product that RS-485 communication function (Modbus RTU mode) was added to the digital setting type. It is suitable for continuous monitoring of the driver status or to reduce wiring. When replacing the conventionalmodel or the analog setting type with the RS-485 communication type, the same cables, except for the RS-485 communication cable, can be used as is because the number of I/Os is the same.8. Summary
Oriental Motor improved the performance of the BLH Series, including “tracking performance in speed” and “reduction in noise”, so that customers will continue to use a wide range of
applications in the future. Since the driver size is maintained, simply replacing the driver from the conventional model can achieve these performance improvements. This is another advantage of this product.
Applications continue to change with technological advances. In particular, advances related to network technologies are remarkable, and factory automation and predictive maintenance by IoT are more widespread with the introduction of 5G mobile communication system. In the field of motor control as well, technological advances, responses to networks with diversification, and improvements of performance will be demanded.
Oriental Motor will continue to develop products to meet changing customers̕ needs and contribute to technological development in the future.
DC Input Brushless Motors
