Stepper Motors > Technology > Improving Stepper Motor Design for Torque and Vibration
Improving Stepper Motor Design for Torque and Vibration
As demands increase for machine automation, companies are often required to think of ways to maximize productivity in the same square footage. Using high torque stepper motors is a way to maximize productivity by increasing the throughput of existing machines, or by making machines smaller. First, we will discuss the advantages offered by high torque stepper motors to machine builders.
1. What are the Advantages of Using High torque stepper motors?
Increased Load Capacity or Throughput
By having more torque compared to other motors in the same size, high torque stepper motors can increase the load capacity and production throughput of a machine without increasing its footprint.
Machine Footprint Can Be Minimized
By using smaller motors that can match the torque output of bigger motors, the size of a machine or device, such as 3D printers, robotic arms, medical pumps, or valves, can be minimized.
Other Hidden Benefits

Because of their high power density, stepper motors traditionally run hot and cannot run continuously. High torque stepper motors present several alternatives to improve performance. A motor’s operating temperature is approximately proportional to input current, and a 15° C (27° F) decrease can double a motor’s expected life. By reducing the current to a level that is just right f`or the motor and application, a stepper motor can actually run cooler and longer, which means more production throughput and less maintenance for your machines. Lastly, since Watts = Volts x Amps, reducing the current means reducing power consumption, which can also help reduce operating costs.
2. How Do You Get More Torque Out of a Motor?
First, we need to understand where torque comes from. In simple terms, torque can be described as the rotational force generated by the electromagnets in the stator interacting with the permanent magnets in the rotor.
While aluminum-nickel-cobalt (AlNiCo) and samarian-cobalt (SmCo) magnets were popular in the past, most motors in the market now use a neodymium-iron-boron (NdFeB) rare earth magnet in the rotor for its high magnetic field strength. Assuming that the permanent magnet stays the same, torque is proportional to the number of winding turns on the stator pole multiplied by the input current.
![]()
T: torque
N: winding turns
I: current
To increase the torque of a motor, either the winding turns or the input current will need to increase. Now that may sound easy, but there are problems with either approach. Since the winding turns are typically designed to their maximum values by motor manufacturers, the easiest way to increase the number of winding turns is to increase the motor size. Increasing the input current can also raise the operating temperature of the motor, which limits duty cycle or may damage the copper windings if used for a long duration.
To increase torque, some motor manufacturers have explored using stronger magnets, adding more stator teeth, or adding permanent magnets between the slots of the stator teeth, but these high torque designs often make the motor a little more expensive.
Another way to increase torque is to use a stepper motor in a bipolar series or parallel configuration as opposed to a unipolar or bipolar half coil configuration. By doing this, electrical properties of the winding, such as voltage, resistance, and inductance, can be altered, and both speed and torque performance of the motor will also change. By using the full coil of the motor windings, torque can be increased by a factor of √2, or approximately 41%. Current trends of lowering driver costs and improving performance have positioned bipolar stepper motor configurations as the primary choice for most applications.
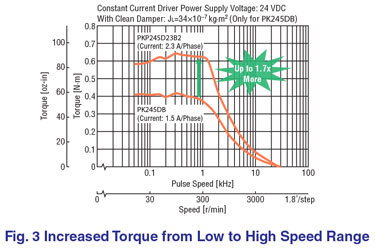
In this paper, we will introduce a high torque design that increases torque in a different way while also minimizing vibration. The result of our design and manufacturing efforts have increased the maximum holding torque of our motors 1.2 to 1.7 times more than conventional models in the same size, and about 20% more than our previous high torque stepper motors.
3. How Did We Do it?
Instead of just focusing on magnets, teeth, windings or current, we looked at the entire process of design and manufacturing and made several technological advances.
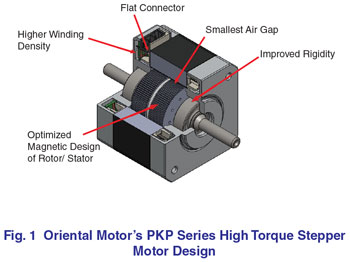
Optimized Magnetic Design of Rotor/ Stator
· Rotors and Stator Diameter Ratio
A specific ratio between the inner diameter of the stator and outer diameter of the rotor maximizes their magnetic flux. However, making the rotor too large increases the rotor inertia and can make the motors less responsive to speed changes. A larger rotor diameter also causes the space for the stator windings to decrease thus decreasing the magnetic flux generated. Repeated tests were performed to determine the best ratio.
· Stator Laminations
To minimize magnetic flux loss, we focused on the design of the salient-pole width, back-yoke width, and surface area of the small teeth on our stator laminations. Tooth shape is also more squared than past designs, which minimizes the loss in magnetic flux across stator teeth and rotor teeth.
· Rotor Laminations
A rotor is manufactured by fastening a number of thin toothed silicon steel laminations on each side of the permanent magnet. Research has proven that there is an ideal number of laminations that maximize torque. By reviewing the peak voltage and saturation voltage of the magnetization properties, we were able to simultaneously increase torque and lower vibration caused by torque ripples.
Improved Rigidity
A larger bearing was adopted to improve rigidity and increase radial loads. The base diameter of the shaft has been increased. This has resulted in a radial load 1.4 to 1.5 times larger than past designs. An adhesive was also added to the bearing assembly on the output side of the motor, which created less clearance on the bearing-case assembly, more room to increase the rotor length, and less vibration. We also improved the fastening method of our stator laminations to increase the rigidity of the rotor and stator cores, which also helped lower the vibration generated by the motor even further.
Flat Connector
After regularly listening to feedback from customers, we updated our design with a flat connector. This increased freedom for the cable output direction and created a smaller footprint for the connector and cable assembly to help allow machines to be smaller.
Smallest Air Gap
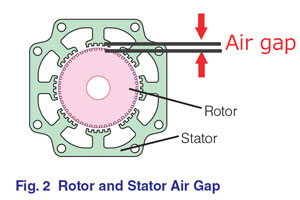
Minimizing the tiny air gap between the stator and rotor teeth is no easy task. It is a critical part of motor design as machining inaccuracy can lead to uneven rotation, missed steps, vibration, noise, or even a locked rotor. It requires extensive review and repeated testing of many design and manufacturing processes.
Through unique tool management techniques as well as adaptation of higher precision machinery, we were able to reduce the tolerances for the diameters of both the rotor and stator laminations as well as the final fitting clearance for both ball bearing diameter and shaft press. This kind of precision also requires greater care of both parts and machinery. For the stator and rotor cores, high pressure washing and ultrasonic cleaning are regularly used to remove foreign matter from our processes. Regular trainings were also necessary for our operators.
As a testament to our manufacturing and assembly accuracy, we were able to reduce the air gap to 30 micrometers (0.03 mm). As a comparison, a strand of human hair is 17 to 181 micrometers thick. Historically, most motor manufacturers started from a design that had an air gap of about 100 micrometers. Our research shows that a 10 micrometer decrease in air gap increases torque by approximately 5%.
High Winding Density
It was stated earlier that it is difficult to increase a motor’s torque output without increasing its size. With an advance in high density winding technology, we were able increase winding density by 8% by increasing the winding wire diameter while keeping the number of turns the same. The bigger wire diameter lowered the winding’s electrical resistance thus also lowering the power loss (I2R) of the motor by 2W or more. This combination of increased efficiency contributed to higher torque, lower heat generation, and lower vibration of the motors.
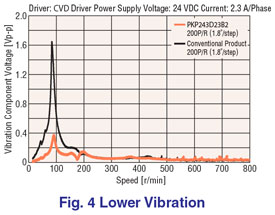
4. Results: More Torque, Less Vibration
As mentioned previously, our PKP Series stepper motors can offer 1.2 to 1.7 times more torque than motors in the same size, but what’s also important is that we were able to lower the vibration of the motors.
5. Summary:
There are many ways to increase torque of a stepper motor. By combining improvements from different parts of motor design, such as magnetic design, rigidity, air gap, and winding density, Oriental Motor was able to create a better overall stepper motor while keeping prices economical for practical applications. With a full lineup from 20 mm (NEMA 8) to 85 mm (NEMA 34) with optional encoders or gearheads, we believe our newly redesigned PKP Series high torque stepper motors are ideal for any application that requires higher torque or smaller footprint.
More about PKP Series
For higher stop accuracy, we offer high resolution type motors with step resolutions of 0.9° or 0.36° for ±2 arc minute (±0.034°) stop accuracy. For applications requiring better microstepping accuracy, even lower vibration, or lower noise, we encourage you to try 5-phase stepper motors. To help make upgrades easier, both 2-phase and 5-phase motors are offered in the same frame sizes and output shaft dimensions.
To learn how the performance of these motors can be improved further, please read our other paper, Overcoming Rotation Vibration, CVD Series 2-Phase Bipolar Driver.
About the Author
Johann Tang is a Product Specialist at Oriental Motor USA Corp. with over 15 years of knowledge and experience supporting various types of electric motor and actuator products.
2-Phase Bipolar Stepper Motors

5-Phase Stepper Motors
