Product & Training Videos > SCARA Robot
SCARA Robot
This video demonstartes how a 5-axis pick-and-place SCARA robot can be built with 2 of our hollow rotary actuators, a harmonic geared stepper motor, a compact cylinder and a compact gripper from the same product family.
To shorten the learning curve, all of these products use the same battery-free mechanical absolute encoder technology and use the same drivers.
1. A Custom-built SCARA Robot (Demo)
This custom-built SCARA robot (demo) was made using motors from Oriental Motor.
Although Oriental Motor does not build or sell robots, we built this demo to show that our motors are suitable for articulated driving.
2. Specifications of the Custom-built SCARA Robot (Demo)
|
SCARA Robot Demo |
||||||||||
Number of Axes |
5-axis (3-link + Raising/lowering + Electric gripper) |
||||||||||
Control Method |
EtherNet/IP (From the MRC01 to the driver is controlled via RS- 485 communication) |
||||||||||
Transportable Mass |
0.7 kg |
||||||||||
Motion Radius |
Radius 454.4 mm (Tool tip) |
||||||||||
Speed |
Maximum Speed of Demo: Reference: Maximum Speed of Each Axis:
|
||||||||||
Repetitive Positioning Accuracy |
Repetitive Positioning Accuracy: Within ±0.002 mm (Repetitive positioning accuracy near hand) Repetitive Positioning Accuracy of Each Motor
Angular transmission accuracy is shown for the axis J3 harmonic geared type under no-load conditions. |
||||||||||
Main Power Supply |
100 VAC |
||||||||||
Mass |
4 kg (Custom-built SCARA robot) |
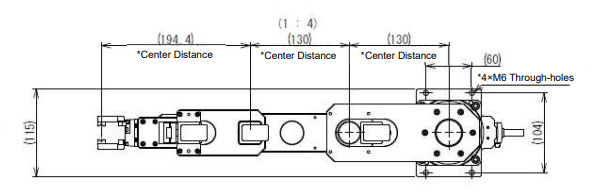
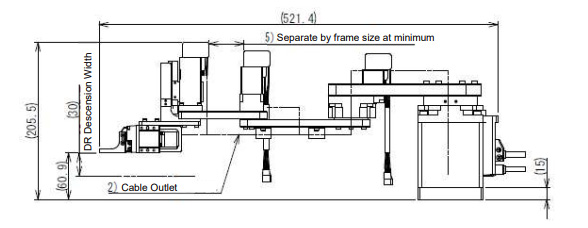
3. Main Dimensions of Demo (Reference)
4. Products Used

The following products were used in the demo unit.
|
Axis |
Product Name |
Product Name |
1 |
Axis 1 |
DGM85R-AZAK |
Hollow Rotary Actuators |
2 |
Axis 2 |
DGM60-AZAK |
Hollow Rotary Actuators |
3 |
Axis 3 |
AZM24AK-HS50 |
AZ Series Harmonic Geared Type |
4 |
Axis 4 |
DR28T1A03-AZAKD-F |
Compact Electric Cylinders |
5 |
Axis 5 |
EH3-AZAKH |
Electric Grippers |

