Stepper Motors > Technology > AZD-KRD Compact Driver Development
Development of AZD-KRD (AZ Series Compact Driver)
In recent years, automated devices such as articulated robots have been getting smaller and lighter thus increasing the need to place drivers closer to the motor to save space. The AZD-KRD compact driver has a smaller volume than the conventional product due to its radical design. This was achieved by: eliminating switches, replacing I/O control with RS-485 communication, and redesigning the structure of the connectors and case. Additionally, to reduce wiring, the drive employs a daisy-chain connection that combines the power line and communication line into one connector. To further enhance the product, the AZD-KRD was equipped with a battery-less absolute system and a variety of operating functions. This article will explain in detail how miniaturization was achieved.
1. Introduction
The introduction of automated equipment that substitutes human labor has progressed. In previous generations, the driver is installed inside the control panel and the wiring is routed to the motor. This wiring occupies a lot of space and can be difficult to route. In addition, cables will add additional load to the motor which may require a larger motor to meet the higher demand. Wiring is one of the factor that affect the size of the equipment. To reduce wiring, it is necessary to place the driver close to the motor, as shown in Figure 1.
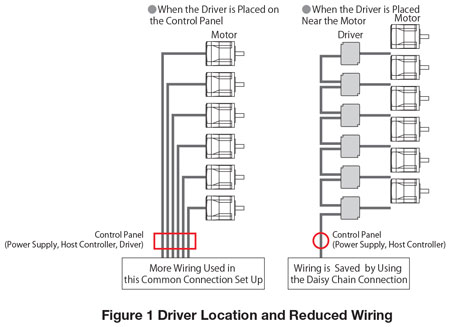
Oriental Motor has developed the AZ Series compact driver (AZD-KRD) to meet the needs of a small, lightweight driver with reduced wiring.

2. Miniaturization of the Driver
2.1 Optimized Driver Interface
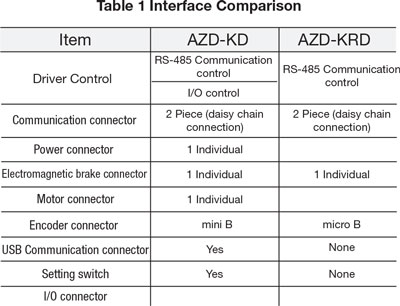
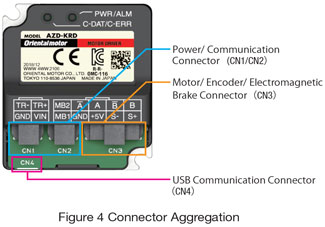
One of the challenges in making drivers smaller is how to reduce the space occupied by connectors and switches. AZD-KRD consolidates the power supply line and communication line into one connector and the motor, encoder, and electromagnetic brake into another connector. AZD-KRD is controlled by RS-485 communication thus allowing the removal of switches and I/O connector. By using our MEXE02 support software, the driver settings can be changed from a PC via a dedicated USB connection. Table 1 compares the traditional AZD-KD with the AZD-KRD mini interfaces. Figure 4 shows the layout of the AZD-KRD connector.
2.2 High Density of Mounting Components
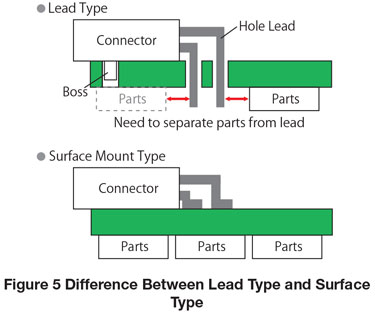
Reducing the size of the printed circuit board reduces the mounting area for electronic components. Therefore, effective use of board space is indispensable for making drivers smaller. KRD uses a surface mount connector and a screw less structure to effectively utilize the board space. When using through-hole connectors, the components on the opposite side of the board will need to be further away from the solder joint. This results in wasted space on the PBC board. AZD-KRD adopted a surface-mounting type connector thus allowing more components to be mounted in the same area (Figure 5).
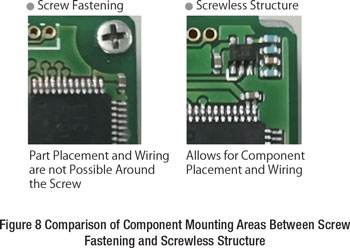
The PCB and heatsink are generally secured with screws. Fastening with screws requires dead space around the hole thus preventing components or traces to be placed nearby, this in effect reduces the mounting surface for components. The AZD-KRD adopts a screw-less design that allows for maximum mounting surface.
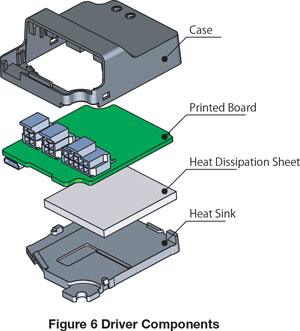
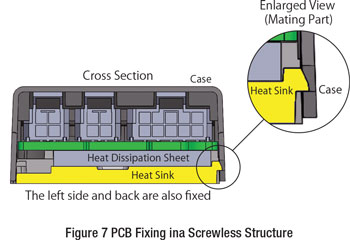
There are latches on all four sides of the case. The PCB and heat dissipation sheet are sandwiched between the case and heatsink. The case and heatsink are latched on four sides as shown on Figure 7.
2.3. Heat Measures
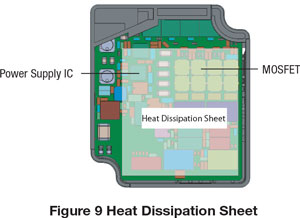
Due to the high density mounting of components, heat generation will be increased therefore heat dissipation measures are required. The AZD-KRD employs countermeasures by placing all the heat generating components on the back side of the PCB where they can be dissipated directly through the heat dissipation sheet(Figure 9).
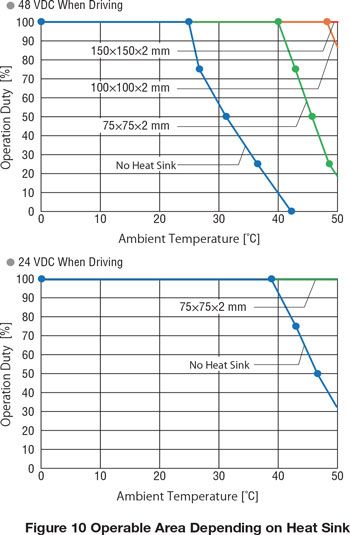
AZD-KRD ambient temperature specification is 0~50°C when used with a 150x150x2 mm aluminum heatsink. However, there are other sizes and materials that could be used. It is difficult to predict the heat dissipation so it is best to monitor the AZD-KRD’s internal temperature via network communication or dedicated software.
The threshold for the drivers internal temperature is 85°C before overheat alarm is generated. Figure 10 shows the relationship between the ambient temperature vs the operating duty with varying size of heatsink.
The stepper motor driver controls the motor with a constant current regardless of the load. However, when rotational speed becomes high, the current flowing to the motor is reduced due to the back EMF generated by the motor. Because of this behavior the driver generates the most heat in the low speed, constant current region. Figure 10 shows the operating limits before triggering overheat protection. For example, a driver with 48VDC input utilizing a 100x100x2 mm heatsink can operate at 85% duty cycle up to 50°C.
2.4. Effective use of Regenerative Power
AZD-KD has a built-in regenerative processing circuit, and the generated regenerative power can be consumed in each driver. On the contrary, since the driver is intended for use in a daisy chain connection of multiple axes, the regenerative power generated by the motor can be effectively used between the drivers. Therefore, the regenerative power generated by the motor is configured to return to the power supply through the power line, and each AZD-KRD driver does not have a built-in regenerative processing circuit.
On the other hand, depending on the operating conditions, load conditions, and the number of connected units, the regenerative power may not be completely consumed between the drivers. In order to meet the demands of operations that generate greater regenerative power, such as axis drive and operations with short takt times, we plan to provide a regenerative processing circuit as an option.
3. Using Less Wiring
3.1. AZD-KRD Wiring
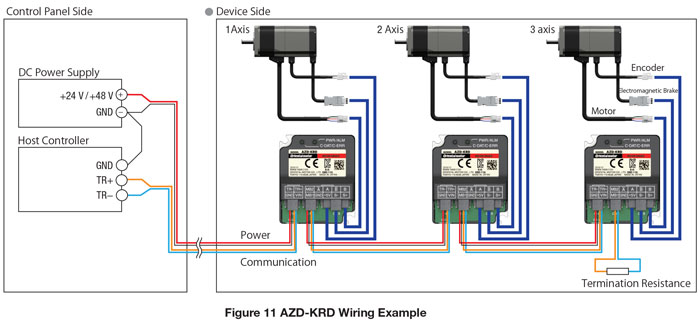
Figure 11 is an example of AZD-KRD wiring schematic. The power supply and host controller are placed inside the control panel. Power and communication can be wired to run to the same connector. The daisy chain capability of the AZD-KRD allows the driver to power and communicate with the next driver in line. The driver furthest away from the host controller will also need a terminating resistor.
3.2. Example of Reduced Wiring
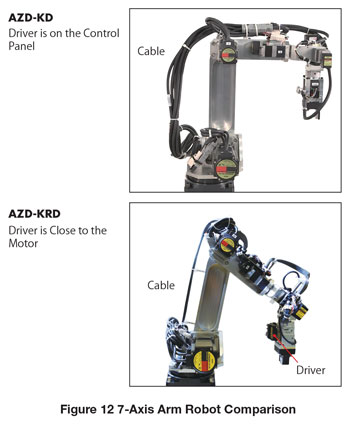
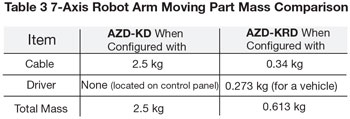
Figure 12 shows a wiring comparison of a 7-Axis robot using the traditional driver vs the AZD-KRD. The traditional driver is housed inside the control panel and each motor and sensor cable will be routed to the individual motor. Since multiple cables are bundled and routed together, wiring is cumbersome, takes up space, and increase the mass of the robot arm. On the other hand, the AZD-KRD can be placed close to the motor, and with the simplified wiring between drivers, the total mass of moving parts is one quarter of the traditional system.
3.3. Cable Extension Distance
AZD-KRD uses a common cable for the power supply and communication line in order to reduce wiring. However, this can introduce noise into the system.
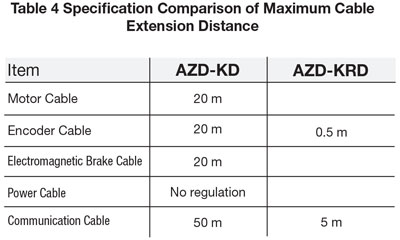
For this reason the AZD-KRD has a noise filter designed into its circuit. The longer the cable, the more susceptible it is to noise, so the total length of all the daisy chain connections has to be less than 5 meters. We focused on ease of wiring and used lead wires without shielding for motor, encoder, and electromagnetic brake cables. Therefore the maximum extension distance is 0.5 meter.
3.4. AZD-KRD Direct Connection Motor
In order to reduce weight, reduce wiring, and improve ease of connection, the conventional shielded cable was replaced with a lead wire type. AZD-KRD’s lineup of direct connection motors can be directly connected to the driver, and are also available is a conversion cable that allows the connection of standard AZ motor to the AZD-KRD.

4. Function
4.1. AZ Series Features
AZD-KRD is a battery-less absolute system built into a compact sized driver. In addition, various operations and functions are available such as stored data operation, and simple sequence function.
The advantages of using stepper motors for articulated robots are: high accuracy positioning, high responsiveness, tuning less, and quick homing with battery-less absolute encoder. The AZ Series has standard mounting dimensions for motor sizes from 20 mm to 60 mm. Oriental Motor also offers a diverse lineup of gear motor, electric slider, electric cylinder, hollow rotary actuators, electric grippers and more.

4.2. ROS Support
ROS (Robot Operating System) is an open-sourced operating system for robots that is becoming popular worldwide because it can move sensors, actuators, and robots easily and simultaneously. Oriental Motor has a ROS package that allows our products to communicate via Modbus RTU. Figure 15 shows an example of the configuration between the Control Node and Modbus RTU Node.
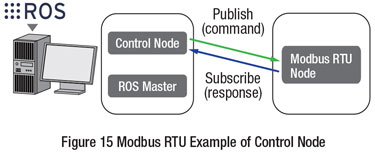
Communication between the host device and driver requires the higher-level device to create a query, send query, and process the response. Since the Modbus RTU package contain functions such as communication timing, and error check, it is not necessary to write the communication code.
5. Summary
AZD-KRD is a product that features a smaller, lighter driver with reduced wiring focused on robot applications. By reviewing the interface and structure, we achieved a significant reduction in size compared the conventional product. In addition, the driver can be installed near the motor, and the wiring can be daisy-chained thus further reducing system size. Despite its’s small size, the AZD-KRD is equipped with the same functions as its bigger sibling. With ROS packages available, it can be use in various robot applications. In the future, we will continue to develop products and technology that will meet the needs of our customers.
AZ Series Mini Driver
