Industrial Robots > Controllers > MRCU Integrated Robot Controller & Drivers
MRCU Integrated Robot Controller & Drivers

MRCU Integrated Robot Controller & Drivers
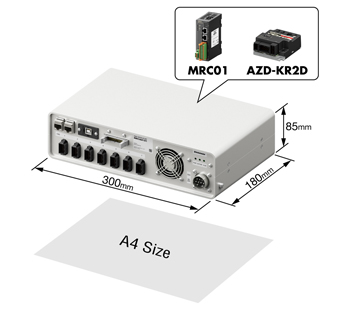
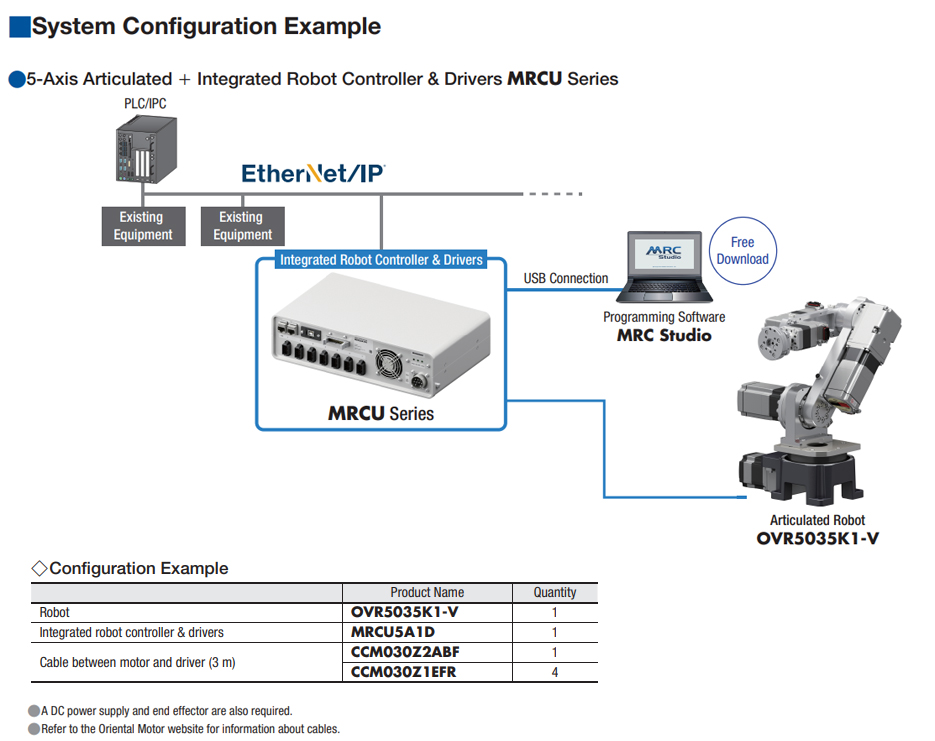
The MRCU Series Integrated Robot Controller combines MRC01 and AZ Series mini Driver (up to 7) in a single package, saving space making wiring easier.
- Controlled via EtherNet/IP™ or I/O
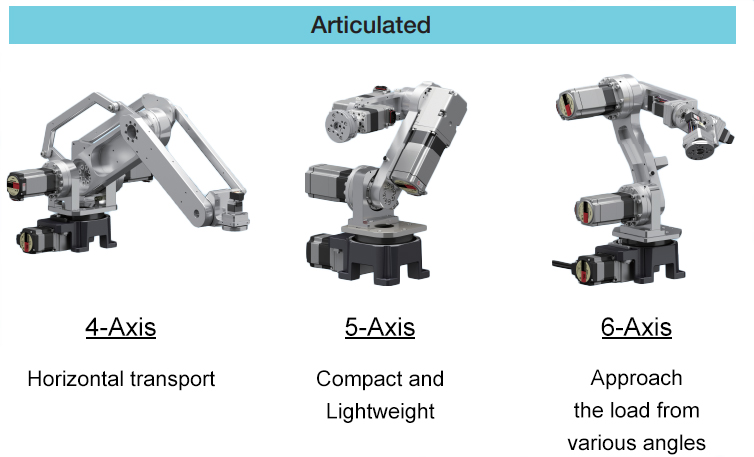
- Connect to the Small Robot OVR Series or actuators equipped with the DC input type AZ Series
- Dedicated free software, MRC Studio, that provides support from start-up to maintenance
![]()
EtherNet/IP™ is a trademark of ODVA.
Product Lineup
Item |
Network |
Power Supply |
Number of Total Axes |
Number of Robot Axes |
Number of Peripheral Axes |
MRCU Series |
EtherNet/IP™ |
24 VDC |
3 |
2 |
1 |
3 |
0 |
||||
4 |
2 |
2 |
|||
3 |
1 |
||||
4 |
0 |
||||
5 |
3 |
2 |
|||
4 |
1 |
||||
5 |
0 |
||||
6 |
4 |
2 |
|||
5 |
1 |
||||
6 |
0 |
||||
7 |
5 |
2 |
|||
6 |
1 |

Controller and Drivers in a Single Package
|
The robot controller MRC01 and AZ Series mini driver (3 to 7 axes) are in a single package. This eliminates the need for wiring between the controller and drivers and between drivers. It is also compact, which contributes to space savings. |
|---|
|
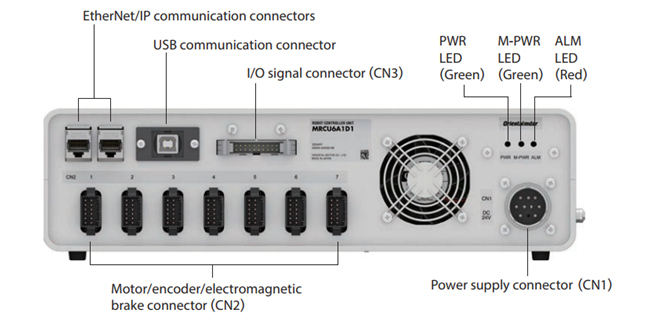
*USB connector (Type B) is for connecting to a computer. |
|---|
Programming Software MRC Studio
 |
|
|---|
Easy Setup Quickly
Easy Setup, Even for Beginners
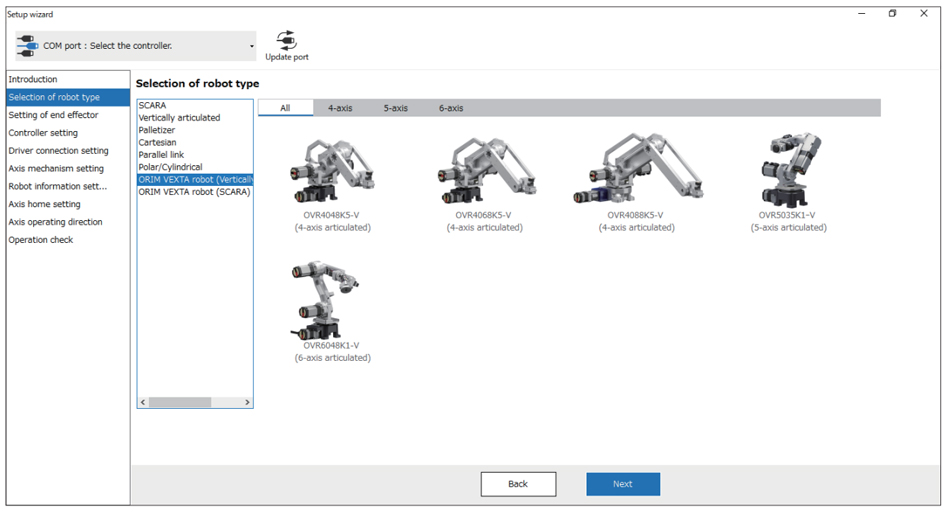
Small robots OVR can help reduce setup time because dimensional data, such as arm length, is already registered.
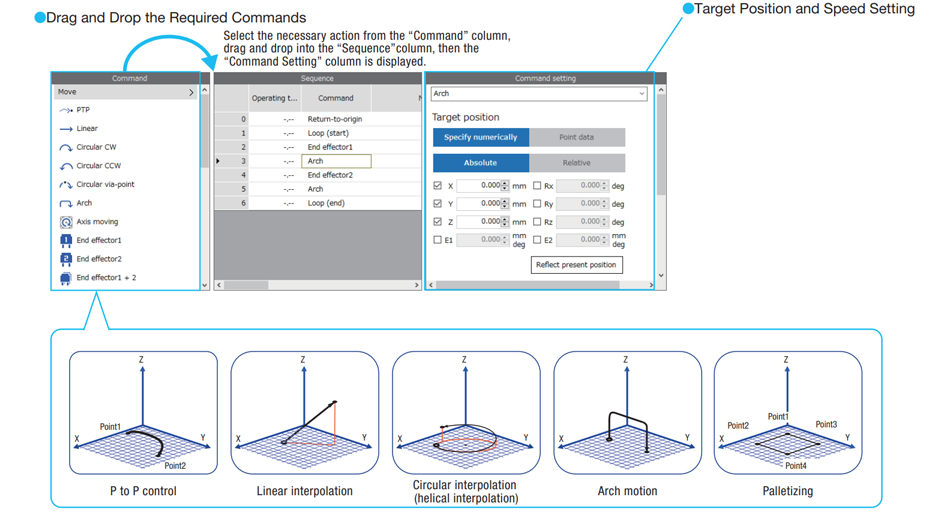
Say Goodbye to Ladder Logic! Operation Programming with Item Selection
Program creation uses a simple command selection format. Programs can be created intuitively, without requiring specialized knowledge such as ladder diagrams. The system supports a range of advanced motion control operations, including P-to-P, linear interpolation, circular interpolation, and arc motion, among others. Operating data is executed directly from a host controller via EtherNet/IP
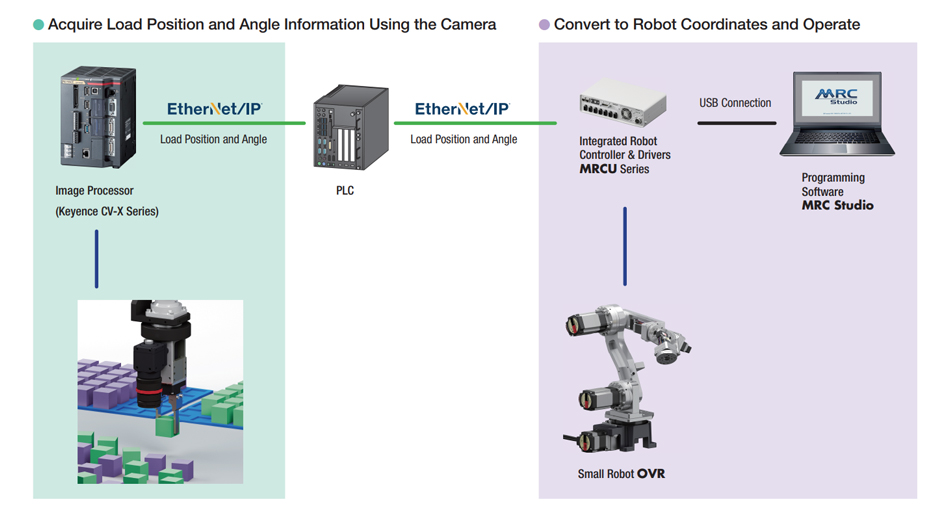
Configuration of a Robot Vision System Using 2D Cameras
The robot controller is equipped with useful functions for operating the robot using load position and angle information acquired by the camera.
In order to integrate the 2D camera, MRC Studio is used to perform the calibration* in advance. The settings can be easily confi gured by simply following the on-screen instructions while looking at the illustrations, allowing for a reduction in the work hours necessary for correction.
*Up to two motors
System Configuration

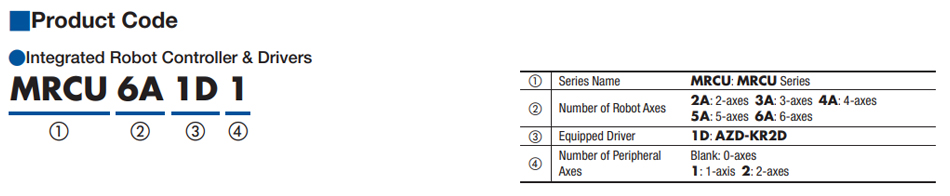
Part Number Code