Servo Motors > Servo Motor Drivers > Hybrid Servo Motor / Stepper Motor Drivers > Hybrid Servo Motor / Stepper Motor Driver - αSTEP AZ Series (AC Input)
AZ Series Hybrid Servo Motor / Stepper Motor Drivers (AC Input)

αSTEP Hybrid Step-Servo
AZ Series Hybrid Servo Motor / Stepper Motor Drivers (AC Input)
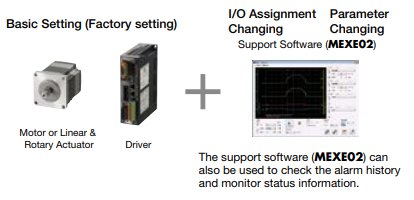
The αSTEP AZD (AC Input) Stepper Motor Drivers offers superior high speed performance, high functionality and closed loop control. There are no external sensors to buy as the motor and driver complete the system. Advanced operation and function control is included through our MEXE02 software (free download). The αSTEP AZD (AC Input) Drivers can perform quick positioning operations over a short distance without the need for tuning, while providing smooth performance.
- Built-in Protective Functions
- Emergency Torque Off Function
- Pulse Input, Pulse Input with RS-485 Communications, Built-in Controller (Network), EtherNet/IP™, EtherCAT or PROFINET Compatible Types
- Single-Phase 100-120 VAC or Single-Phase/Three-Phase 200-240 VAC
- For use with αSTEP AZ Series Stepper Motors (AC Input)
Product Lineup
Stepper Motor Drivers |
Driver |
Motor Types |
Power Supply |
|---|---|---|---|
|
AC Input Closed Loop, Absolute Encoder AZ Series Stepper Motors |
Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |
|||
|
AC Input Closed Loop, Absolute Encoder AZ Series Stepper Motors |
Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |
|||
|
AC Input Closed Loop, Absolute Encoder AZ Series Stepper Motors |
Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |
|||
Stored Data (Network) |
Closed Loop, Absolute Encoder AZ Series Stepper Motors | Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |
|||
Pulse Input with |
Closed Loop, Absolute Encoder AZ Series Stepper Motors |
Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |
|||
Pulse Input |
Closed Loop, Absolute Encoder AZ Series Stepper Motors |
Single-Phase 100-120 VAC |
|
Single-Phase/Three-Phase 200-240 VAC |





αSTEP Performance
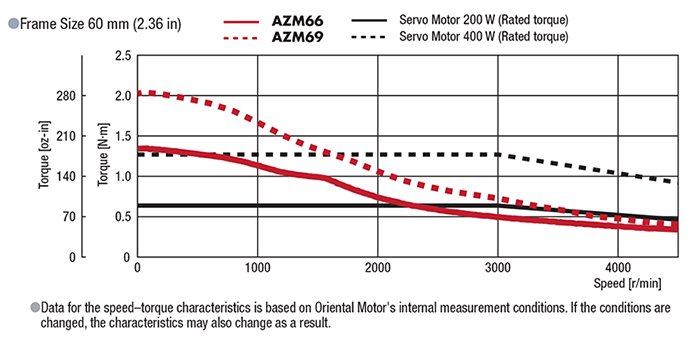
What is the Output of αSTEP?
"Rated Output" is not listed because αSTEP has no "rated speed". Refer to the graph below to compare rate torque of the αSTEP to Watts of of servo motor's rated output torque.
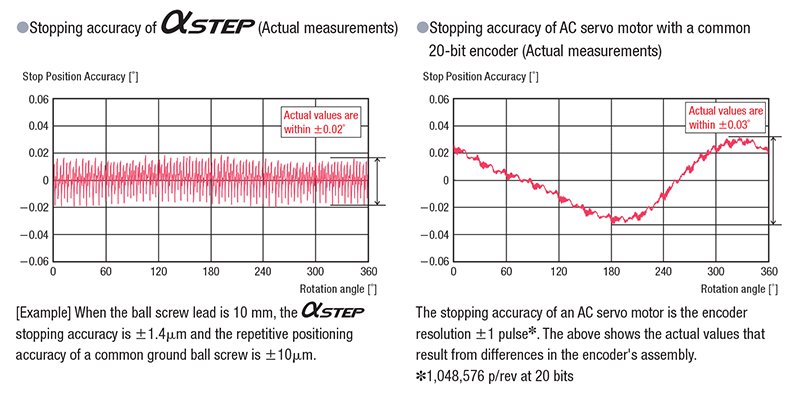
What is the Stopping Accuracy of αSTEP?
The stopping accuracy of a typical αSTEP is ±0.05° (under no load), which is equivalent to that of servo motors. The graphs below show the actual measured stopping accuracies when an αSTEP and an AC servo motor were rotated once.
Advanced Technology at Affordable Prices
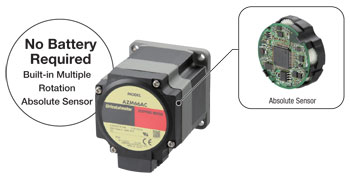
Oriental Motor has developed and patented a compact, low-cost, battery-free mechanical type absolute sensor. The αSTEP AZ Series is available at affordable prices and can contribute to improved productivity and cost reductions.
Mechanical-Type Encoder (No Battery Required)
A mechanical sensor composed of multiple gears is employed. Positioning information is detected by recognizing the angle of the individual gears. As a result, it does not require a battery.
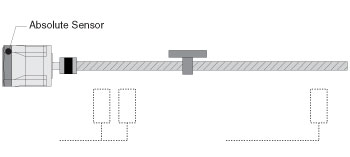
Multiple-Rotation Absolute System*
Absolute position detection is possible with ±900 rotations (1800 rotations) of the motor shaft from the home position.
No External Sensors Required
Positional information is managed mechanically. External sensors such as home sensor and the limit sensor are not needed.
Reduced Cost
Sensor costs and wiring costs can be reduced, allowing for lower system costs.
Simple Wiring
Wiring is simplified and the degree of freedom for equipment design is increased.
Not Affected by Sensor Malfunctions
There is no concern about sensor malfunctions (when operating in environments filled with oil mist or filled with metal pieces due to metal processing), sensor failures or sensor wire disconnections.
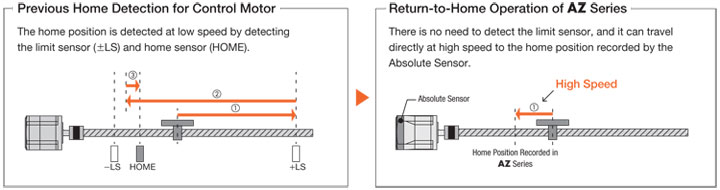
Improved Return-to-Home Accuracy
Home position accuracy is increase because the return-to-home operation is performed regardless of any variations in home sensor sensitivity.
Shortened Reset Time - High Speed Return-to-Home
Because return-to-home is possible without an external sensor, return-to-home can be performed at high speed without taking the sensor sensitivity into account, allowing for a shortened machine cycle.
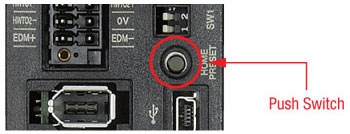
Home Setting Method
The home position can be easily set by pressing a switch on the drivers surface, which is saved by the Mechanical Absolute Encoder. In addition, home setting is possible with the MEXE02 data setting software or external input signal.
Home position is easy to adjust by moving the motor to a desired position manually.
No Battery Required

No battery is required thanks to a mechanical-type sensor. Because positioning information is managed mechanically by the Mechanical Absolute Encoder, the positioning information can be preserved, even if the power turns off, or the cable between the motor and the driver is disconnected.
Reduced Maintenance
Because there is no battery that needs replacement, maintenance time and costs can be reduced.
Unlimited Driver Installation Possibilities
Because there is no need to secure space for battery replacement, there are no restrictions on the installation location of the driver, improving the flexibility and freedom of the layout design of the control box.
Safe for Overseas Shipping
Normal batteries will self-discharge, so care must be taken when the equipment requires a long shipping time, such as when being sent overseas. The Mechanical Absolute Encoder does not require a battery, so there is no limit to how long the positioning information is maintained. In addition, there is no need to worry about various safety regulations, which must be taken into consideration when shipping a battery overseas.
Position Holding Even when the Cable between the Motor and Driver is Detached
Positioning information is stored within the Mechanical Absolute Encoder.
*Because the positioning information is stored in the Mechanical Absolute Encoder, the home position must be reset if the motor is replaced.
EtherNet/IP™ More Control over the Network
EtherNet/IP™ Compatible Driver
With the EtherNet/IP driver, the operating data can sent from the host system or can be set in the driver and selected and executed from a host system. Host system connection and control are performed with I/O Stored Data or EtherNet/IP communications.
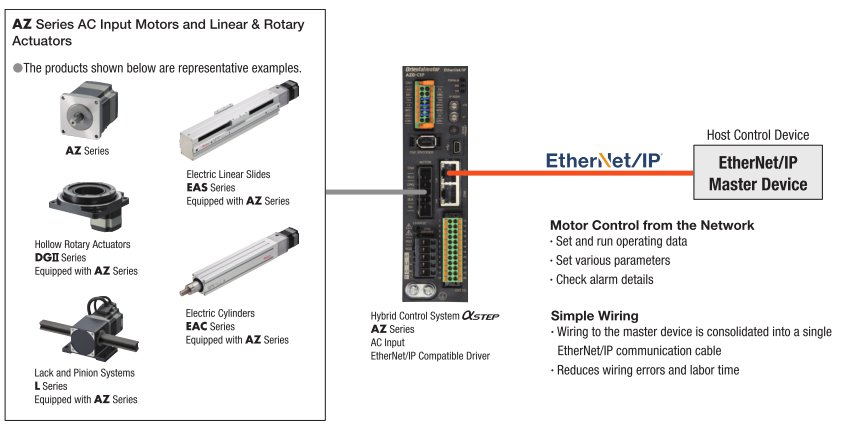
AZ Series EtherNet/IP™ Drivers
Easily control the AZ Series by directly connecting to the EtherNet/IP master device using a single EtherNet/IP communications cable. This allows for quick and simple wiring.
Support Software, EDS File & Add-On Instructions
An EDS file has been prepared to allow EtherNet/IP compatible products to be used more easily.
Add-On Instructions (AOI) for AZ Series EtherNet/IP drivers, v1.0 Use the AOI to save programming time or make it easier to read or write your data parameters in the AZ Series drivers.
- Move Command
- Operation Position / Speed
- Current Settings or Accel/Decel Settings
- Monitoring
- Direct Data Operation (changing data on the fly)
AZ Series Family of Motion Control with EtherCAT
Easily control the AZ Series by directly connecting to the EtherCAT master device using a single EtherCAT communications cable. This allows for quick and simple wiring.
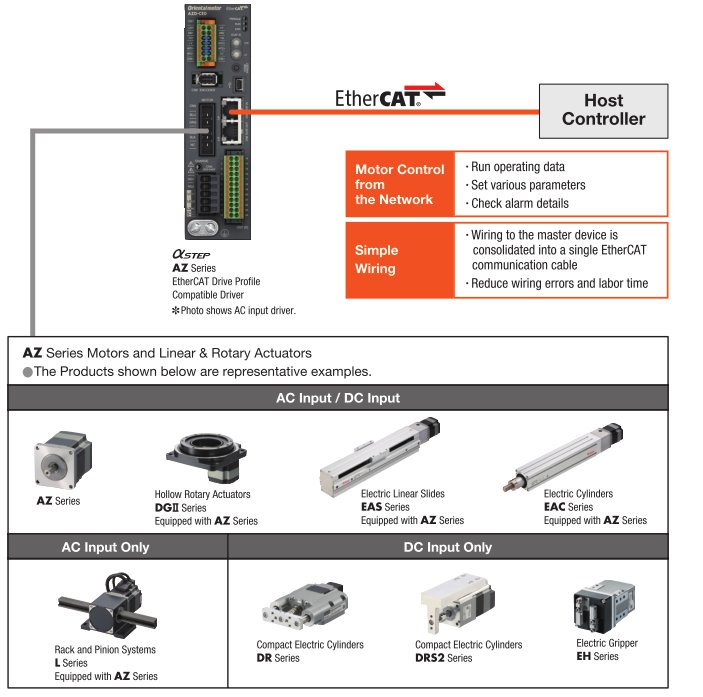
ESI File
An ESI file has been prepared to allow EtherCAT compatible products to be used more easily.
PROFINET Compatible Drivers
AZ Series PROFINET Drivers
Easily control the AZ Series by directly connecting to the PROFINET master device using a single PROFINET communications cable. This allows for quick and simple wiring.
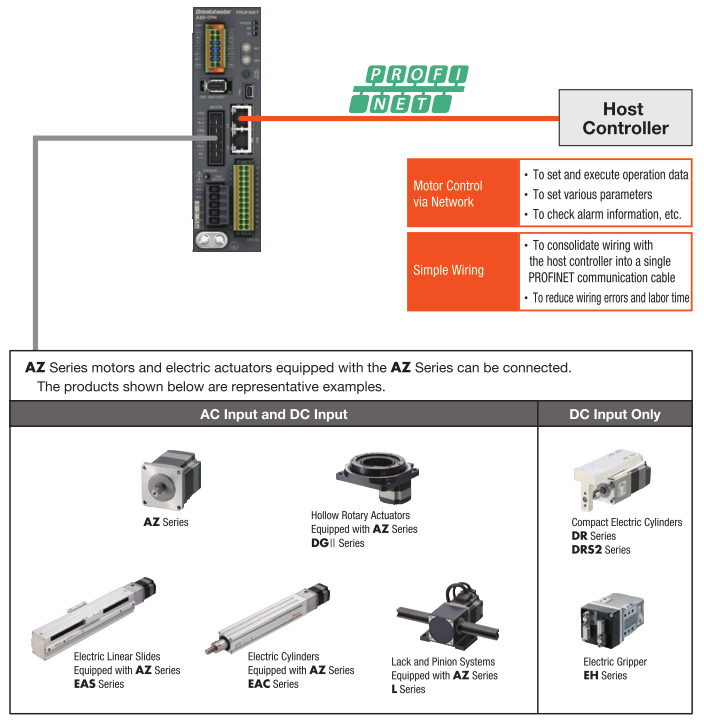
Support Software & GSD File
An GSD file has been prepared to allow PROFINET compatible products to be used more easily.
- Move Command
- Operation Position / Speed
- Current Settings or Accel/Decel Settings
- Monitoring
- Direct Data Operation (changing data on the fly)
Stored Data (Network) Type Driver with Built-in Controller
Built-in Controller (Stored Data Type) Driver
With the built-in controller type, the operating data is set in the driver and is selected and executed from a host system. Host system connection and control are performed with ; I/O, Modbus (RTU) / RS-485 or FA network.

Equipped with an Interface that Connects to Various Master Control Systems
FLEX is the generic name for products that are used for Factory Automation (FA) network control via I/O control, Modbus (RTU) control, or a network converter.
FLEX products enable easy connection, easy control, and reduce the complexity of system configuration.
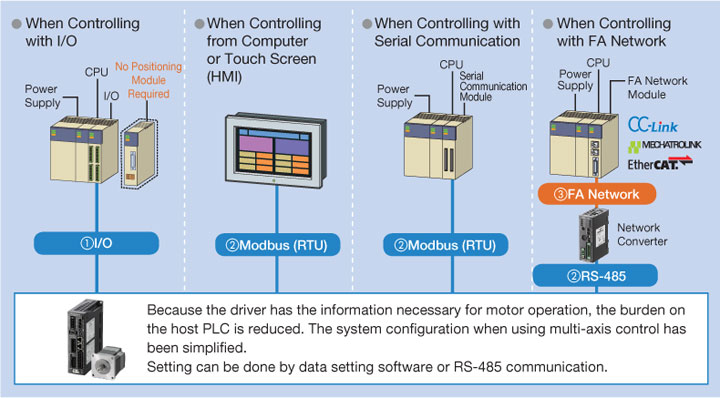
By using a network converter (sold separately), CC-link, MECHATROLINK or EtherCAT communication are possible. Operating data, parameter settings and operation commands can be input via various communication types. Its ability to accommodate the network being used results in shortened design time.
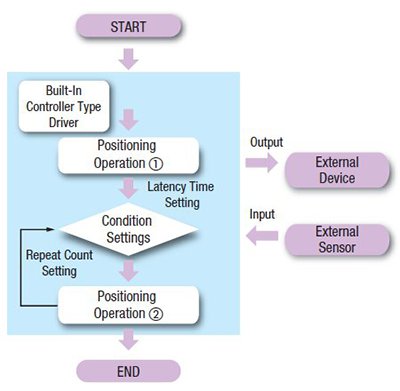
Program Simplification with Easy Sequence Function
Sequence control program simplification is possible with the built-in controller type by incorporating output signals for controlling other devices and external input signals, such as sensors.
The built-in controller type driver can set and execute independently, up-to 256 items of operating data, such as motor speed and index length. With the sequential control, it is possible to form a simple system without a master controller. This is ideal for index and return operations or aligned transportation, such as lifespan or durability tests.
- Number of positioning operation data settings (up to 256 data settings)
- Number of general-purpose input/output points (9 input points, 6 output points)
- Number of input/output points for communication (16 input points, 16 output points)
Extended Functions
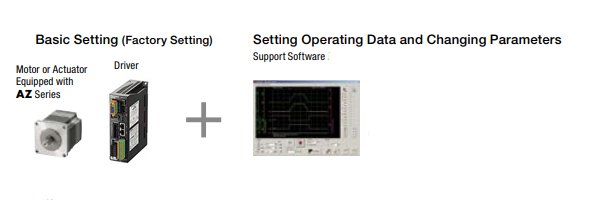
Easy Setting and Easy Driving
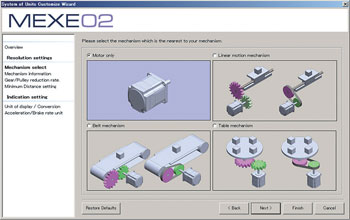
Unit Setting Wizard
This is a function that allows the traveling amount, speed, etc. to be displayed and input in the designated units. It can be easily set by following the directions displayed on the screen.
Teaching and Remote Operation
Data setting software can be used to perform the home setting and also drive the motor. This can be used for teaching or test drive purposes.

Monitoring Function
I/O Monitoring
The status of the I/O wired to the driver can be checked on a computer. This can be used for post-wiring I/O checks or I/O checks during operation.

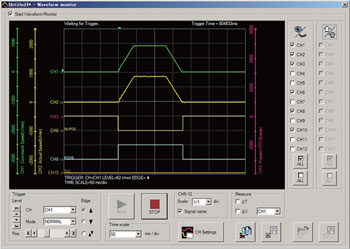
Waveform Monitoring
The operating status of the motor (such as command speed and feedback speed), can be checked by an oscilloscope-like image. This can be used for equipment start-up and adjustment.
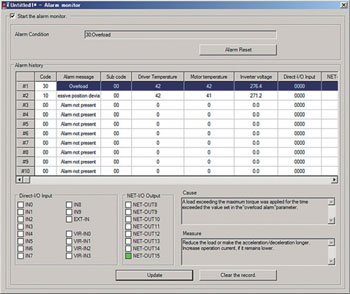
Alarm Monitoring
When an abnormality occurs, the details of the abnormality and the solution can be checked. Because the solution can be checked it is possible to respond to abnormalities quickly.
Pulse Input Type
Available in Pulse Input Type or Pulse Input Type with RS-485 Communication
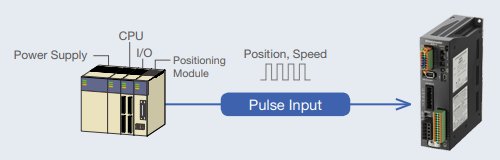
Pulse Input Type
This type executes operations by inputting pulse into the driver. It controls the motor using a positioning module (pulse generator).
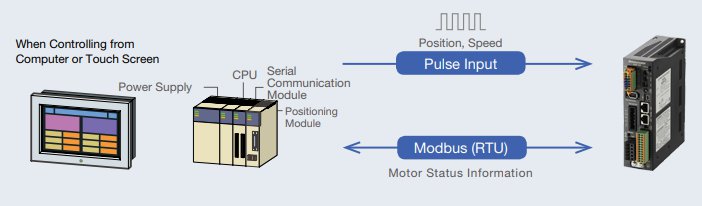
Pulse Input Type with RS-485 Communication
This type executes operations by inputting pulses into the driver. Control the motor using a positioning module (pulse generator) that you have obtained yourself. Motor status information (position, speed, torque, alarm, temperature, etc. ) can be checked by using RS-485 communication.
Extended Functions
Easy Setting and Easy Driving
Unit Setting Wizard
This is a function that allows the traveling amount, speed, etc. to be displayed and input in the designated units. It can be easily set by following the directions displayed on the screen.
Teaching and Remote Operation
Data setting software can be used to perform the home setting and also drive the motor. This can be used for teaching or test drive purposes.
Monitoring Function
I/O Monitoring
The status of the I/O wired to the driver can be checked on a computer. This can be used for post-wiring I/O checks or I/O checks during operation.
Waveform Monitoring
The operating status of the motor (such as command speed and feedback speed), can be checked by an oscilloscope-like image. This can be used for equipment start-up and adjustment.
Alarm Monitoring
When an abnormality occurs, the details of the abnormality and the solution can be checked. Because the solution can be checked it is possible to respond to abnormalities quickly.
αSTEP Family of Products
The αSTEP stepper motors are used in multiple product types to meet your specific application needs; stepper motors available with a wide range of gearing options and brake types, as well as a full line linear actuators and rotary actuators.






AZ Series Closed Loop Stepper Motors

The αSTEP AZ Series offers high efficiency, low vibration and incorporates our newly developed Mechanical Absolute Encoder for absolute-type positioning without battery back-up or external sensors to buy. Closed loop performance without hunting or gain tuning. Available with a built-in controller or pulse input driver which substantially reduces heat generation from the motor through the use of high-efficiency technology. Requires αSTEP AZ Series Driver.
- Battery-Free, Mechanical Absolute Encoder
- Closed Loop Performance, No Hunting or Gain Tuning
- AC or DC Input Types
- Wide Range of Gear Types for Inertia Matching & Higher Torque
- Electromagnetic Brake Type Available
- αSTEP AZ Series Driver Required*
Network Gateways

The communication protocol of the master controller, Factory Automation (FA) network, is converted to Oriental Motor's own RS-485 communication protocol. Connection to Oriental Motor's network compatible products is completed with one RS-485 communication cable.
- Compatible Networks:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*For use with Stored Data (Network) type
![]()
![]()
![]()
DIN Rail Mounting Plate

Use to mount the driver on DIN rail.
Control Options - Control Module

The internal driver parameter settings and data settings can be established and changed. They can also be used for speed and I/O monitoring, teaching, and so on.
*For use with Stored Data (Network) type
24 VDC Control Power Cable

24 VDC power supply cable for driver
Item |
Length |
1.67 ft. (0.5 m) |
|
3.3 ft. (1 m) |
|
4.9 ft. (1.5 m) |
|
6.6 ft. (2 m) |
|
8.2 ft. (2.5 m) |
EtherNet/IP™ Support Software and EDS File
An EDS file has been prepared to allow EtherNet/IP compatible products to be used more easily.
Control Options - Support Software

MEXE02 Support Software for use with Stored Data, Pulse Input or RS-485 Communication Drivers only.
*A standard USB to mini B cable is used to connect all drive options to the computer (sold by a third party).
Communication Cable

These cables are used to link drivers when a built-in controller type is being operated in a multi-drop manner.
*For use with Stored Data (Network) type
Driver Cables (Built-in Controller Type)

It is a general-purpose multi-core cable convenient for connection between the driver and host controller.
*For use with Stored Data (Network) type
Item |
Length |
3.3 ft. (1 m) |
|
6.6 ft. (2 m) |
Driver Cables

General-purpose multi-conductor cable which is convenient for connection between the driver and host controller.
*For use with Pulse Input Type driver.
Straight-Type
Item |
Applicable Connector |
Length |
CN5 (36 pins) |
3.3 ft. (1 m) |
|
6.6 ft. (2 m) |

Right-Angle Type
Item |
Applicable Connector |
Length |
CN5 (36 pins) |
3.3 ft. (1 m) |
|
6.6 ft. (2 m) |
Regeneration Unit

During vertical driver (gravitational operation) or suddent start/stop in high inertia, an external force causes the motor to rotate and funciton as a power generator. When the regenerative power exceeds the driver's regenerative power absorption capacity, it may cause damage to the motor. In such a case, the regeneration unit is connected to the driver to convert regenerative energy into thermal energy for dissipation.
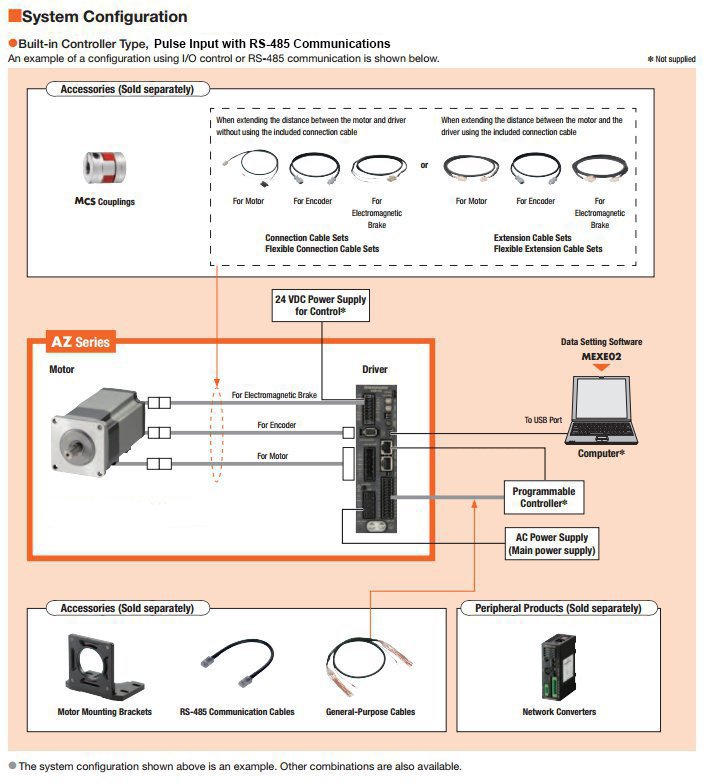
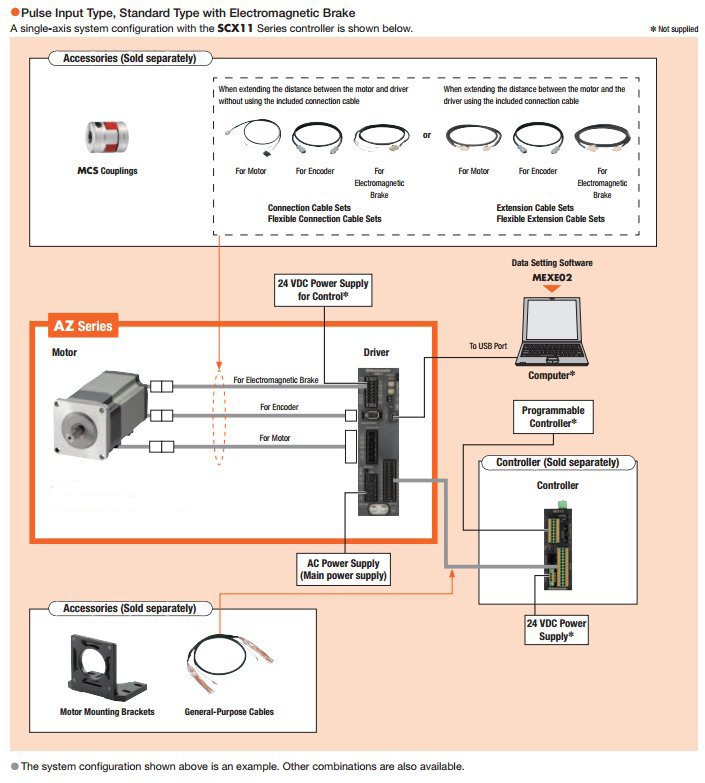
System Configuration
CAD / Manual Search
To locate product CAD and Operator Manuals please search using the product Item Number.
Downloads
- AZ Series Family Brochure
- EtherNet/IP™ AC Input Driver for AZ Series
- MEXE02 Software for Pulse Input, Stored Data and RS-485 Communication Drivers
- EDS File for EtherNet/IP™ AZ Series Drivers
- Support Software for EtherNet/IP™ AZ Series Drivers
- Add-On Instructions (AOI) for AZ Series, Licence Agreement & User Guide
Videos
Technical Articles
Reference
Order Literature

Videos



Hybrid Servo Motor / Stepper Motors
Rotary Actuators
